数字电路智能循迹小车套件,在整个组装过程中我们不但能熟悉机械结构组装,还能学习到:光电传感器、电压比较器、电机驱动电路等相关电子知识。
学生通过动手实践能大大提高解决实际问题的能力,而且智能小车还是一个很好的硬件平台,只要增加一些控制电路就能完成循迹小车、救火机器人、足球机器人、避障机器人、遥控汽车等课题。。
在白色的场地上有一条16毫米宽的黑色跑道,我们的循迹小车能沿着黑色跑道自动行驶,不管是跑道如何弯曲小车都能自动行驶真是太神奇了!大家知道当光源射到白色物体和黑色物体上时的反光率是不同的,我们这里用红色的LED作为光源,光线通过地面反射到光敏电阻上通过检测光敏电阻阻值变化能判断小车是否行驶在白色区域上,如果检测到是黑色跑道,说明小车跑偏,这一侧的电机就会减速甚至停转这一侧的绿色的LED熄灭,驱动小车向相反方向行驶,这样小车就能始终沿着跑道行驶了。
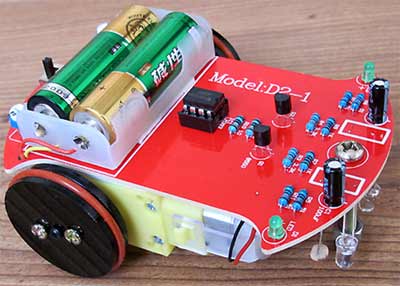
装好的成品如下图所示:
此电路应用到主要元器件:
1、LM393比较器集成电路 : LM393是双路电压比较器集成电路,由两个独立的精密电压比较器构成。它的作用是比较两个输入电压,根据两路输入电压的高低改变输出电压的高低。输出有两种状态:接近开路或者下拉接近低电平,LM393采用集电极开路输出,所以必须加上拉电阻才能输出高电平。
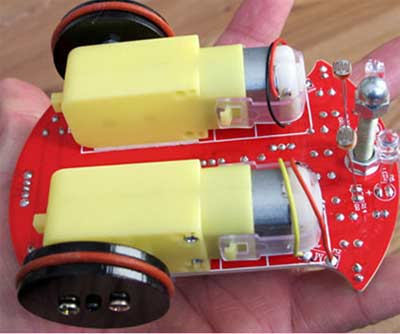
2、带减速齿轮的直流电机 : 直流电机驱动小车的话必须要减速,否则转速过高的话小车跑得太快根本也来不及控制,而且未经减速的话转矩太小甚至跑不起来,我们专门定做的这种电机已经集成了减速齿轮大大降低了制作难度非常适合我们使用。
3、光敏电阻,它能够检测外界光线的强弱,外界光线越强光敏电阻的阻值越小,外界光线越弱阻值越大,当红色LED光投射到白色区域和黑色跑道时因为反光率的不同,光敏电阻的阻值会发生明显区别,便于后续电路进行控制。
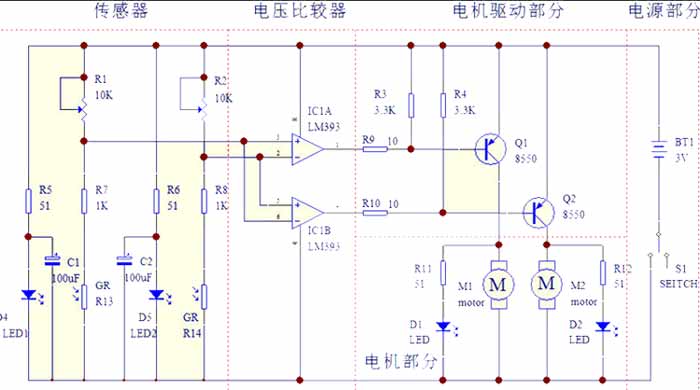
电路原理图如:/pic/1103/xsjc06b.jpg
查看和发表评论
管理员一般会在8-48小时内回复,会删除无意义的留言以及重复留言,请保证留言标题清晰,内容明确!
1、评论不代表本站观点。 另外,即使是本站原创作品,本站也不保证内容绝对正确。
2、如果您拥有本文版权,并且不想在此处发表,请书面通知本站立即删除并且向您公开道歉! | 


{kind=link}