本套件常用元件器的识别与检测能力、电子产品的装配与焊接能力、基本电路的分析及应用能力,同时增强他们对电子产品调试与维修能力、常用检测仪器仪表的使用与操作能力,进而激发学生的学习兴趣等。制作了许多典型的小电路,供高职业院校实践教学。红外倒车雷达电路由多谐振荡电路、红外信号发射与接收电路、红外信号放大及电压比较电路构成,具有电路简单、成本低、电路工作稳定的特点,广泛应用于各种测距场合。
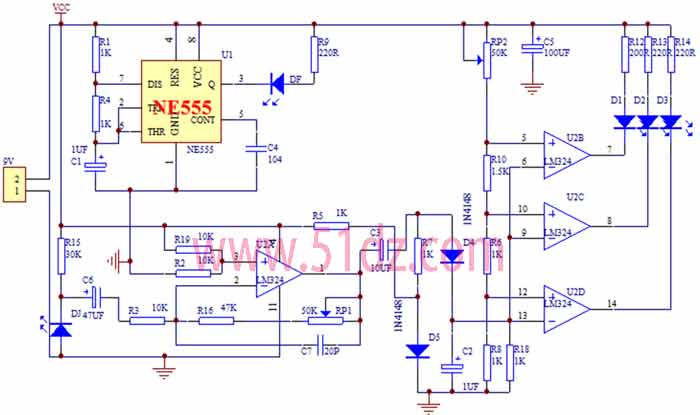
本红外倒车雷达具有电路结构简单、成本低、电路工作稳定的特点,广泛应用于各种测距场合。电路使用红外发射管和红外接收管作为传感器件,电路的核心元件包括NE555和运放LM324。NE555构成多谐振振荡电路发射红外波信号,LM324主要用来放大红外接收信号和构成电压比较器电路,发光二极管用来指示倒车距离范围。
时基电路NE555及周围元件组成多谐振荡器,产生红外波信号,经U1第3脚输出并驱动红外发射管DF发射红外信号,该信号经前方遮挡物反射后由红外接收管DJ接收,并送至U2A及周围元件组成的放大电路进行信号放大。放大后的信号经U2的第一脚输出,C3耦合D4和C2整流滤波后送至U2B U2C U2D的反相输入端,分别与相应的同相输入端电压进行比较,当反相输入端电压高于同相输入端电压时,其输出为低电平,从而使得与输出连接的发光二极管LED点亮,实现D1 D2 D3指示距离远近的效果。

红外发射管HF和红外接收管HJ有极性(长脚为正极),请勿装错。RP1调节反射距离,RP2调节灵敏度,可以尝试距离30cm时LED3亮,距离20cm时LED2和LED3亮,距离10cm时全亮。红外传感器上方用白纸遮挡反射效果最好。
电源直接用直流9V,请勿接错。
查看和发表评论
管理员一般会在8-48小时内回复,会删除无意义的留言以及重复留言,请保证留言标题清晰,内容明确!
1、评论不代表本站观点。 另外,即使是本站原创作品,本站也不保证内容绝对正确。
2、如果您拥有本文版权,并且不想在此处发表,请书面通知本站立即删除并且向您公开道歉! | 

